Ejercicio 5.25. Estudio de los movimientos oscilatorios
 El estudio de los movimientos oscilatorios siempre ha sido motivo de conflicto, sobre todo para los alumnos. ┐Cußl es ese conflicto? En los cursos de Mecßnica, hasta el estudio de los osciladores, se ven sistemas cuyo mayor grado de complejidad se da en casos con valores de aceleraciˇn constante. A partir de allÝ, dicha variable cinemßtica tambiÚn cambia su valor en funciˇn del tiempo, lo que ocasiona en los alumnos cierto desconcierto. Desconcierto que aumenta cuando resuelven las ecuaciones diferenciales para hallar las variables cinemßticas (posiciˇn, velocidad y aceleraciˇn) y / o las variables dinßmicas (cantidad de movimiento y fuerza), y pierden la capacidad de anßlisis del comportamiento del sistema desde el punto de vista fÝsico, sobre todo cuando analizan el comportamiento de las variables que influyen - o no - en los citados movimientos.
Para tratar de solucionar esta situaciˇn, se propone una alternativa de estudio de los distintos Osciladores, utilizando la Dinßmica de Sistemas como herramienta.
El Movimiento Oscilatorio Forzado
Se va a analizar el movimiento oscilatorio en una dimensiˇn, que describe un sistema formado por un pÚndulo de resorte - un cuerpo de masa m, suspendido del extremo de un resorte ideal de constante elßstica k -, cuando se lo perturba -se estira, o se comprime- respecto de su posiciˇn de equilibrio x0, una distancia x. El modelo puede utilizarse para analizar las variables cinemßticas (posiciˇn, velocidad y aceleraciˇn), o dinßmicas (cantidad de movimiento y fuerza).
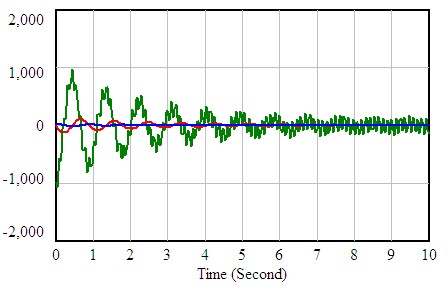
Si bien se pueden analizar las variables en forma individual, se agrupan en dos grßficos: uno que involucra las cinemßticas, y otro para cantidad de movimiento y fuerza. Incluso tiene una ventaja adicional: se puede analizar si existe movimiento oscilatorio amortiguado. ┐Cˇmo se hace? Simplemente, cambiando el valor de la constante de amortiguamiento b, y realizando la simulaciˇn. El siguiente grßfico nos lo muestra.
Si al modelo del oscilador amortiguado se le da el valor de b = 0, se tendrß un movimiento oscilatorio armˇnico. Esto muestra claramente de la gran utilidad educativa que tiene la Dinßmica de Sistemas. Cambiando los valores de las variables que influyen en el movimiento, se puede analizar cˇmo se comporta el mismo. Por ejemplo, para el oscilador armˇnico simple, se puede vislumbrar el cambio en la amplitud, la longitud de onda, y la frecuencia (o el perÝodo, que es su recÝproco) cuando se cambian los valores de k ˇ m en el modelo.
Conclusiones
Podemos obtener del modelo creado las conclusiones siguientes:
- Cuando aumenta la masa, aumenta el perÝodo del movimiento oscilatorio armˇnico;
El estudio de los movimientos oscilatorios siempre ha sido motivo de conflicto, sobre todo para los alumnos. ┐Cußl es ese conflicto? En los cursos de Mecßnica, hasta el estudio de los osciladores, se ven sistemas cuyo mayor grado de complejidad se da en casos con valores de aceleraciˇn constante. A partir de allÝ, dicha variable cinemßtica tambiÚn cambia su valor en funciˇn del tiempo, lo que ocasiona en los alumnos cierto desconcierto. Desconcierto que aumenta cuando resuelven las ecuaciones diferenciales para hallar las variables cinemßticas (posiciˇn, velocidad y aceleraciˇn) y / o las variables dinßmicas (cantidad de movimiento y fuerza), y pierden la capacidad de anßlisis del comportamiento del sistema desde el punto de vista fÝsico, sobre todo cuando analizan el comportamiento de las variables que influyen - o no - en los citados movimientos.
Para tratar de solucionar esta situaciˇn, se propone una alternativa de estudio de los distintos Osciladores, utilizando la Dinßmica de Sistemas como herramienta.
El Movimiento Oscilatorio Forzado
Se va a analizar el movimiento oscilatorio en una dimensiˇn, que describe un sistema formado por un pÚndulo de resorte - un cuerpo de masa m, suspendido del extremo de un resorte ideal de constante elßstica k -, cuando se lo perturba -se estira, o se comprime- respecto de su posiciˇn de equilibrio x0, una distancia x. El modelo puede utilizarse para analizar las variables cinemßticas (posiciˇn, velocidad y aceleraciˇn), o dinßmicas (cantidad de movimiento y fuerza).
Si bien se pueden analizar las variables en forma individual, se agrupan en dos grßficos: uno que involucra las cinemßticas, y otro para cantidad de movimiento y fuerza. Incluso tiene una ventaja adicional: se puede analizar si existe movimiento oscilatorio amortiguado. ┐Cˇmo se hace? Simplemente, cambiando el valor de la constante de amortiguamiento b, y realizando la simulaciˇn. El siguiente grßfico nos lo muestra.
Si al modelo del oscilador amortiguado se le da el valor de b = 0, se tendrß un movimiento oscilatorio armˇnico. Esto muestra claramente de la gran utilidad educativa que tiene la Dinßmica de Sistemas. Cambiando los valores de las variables que influyen en el movimiento, se puede analizar cˇmo se comporta el mismo. Por ejemplo, para el oscilador armˇnico simple, se puede vislumbrar el cambio en la amplitud, la longitud de onda, y la frecuencia (o el perÝodo, que es su recÝproco) cuando se cambian los valores de k ˇ m en el modelo.
Conclusiones
Podemos obtener del modelo creado las conclusiones siguientes:
- Cuando aumenta la masa, aumenta el perÝodo del movimiento oscilatorio armˇnico;
- Cuando aumenta la constante k, disminuye el perÝodo del citado movimiento .
En consecuencia, existe una relaciˇn directa entre el perÝodo de oscilaciˇn y la masa del pÚndulo de resorte, e inversa entre dicho perÝodo y la constante elßstica del resorte. En consecuencia, se podrÝa escribir:
T = m / k
La expresiˇn matemßtica del perÝodo en funciˇn de la masa y de la constante elßstica del resorte, se puede hallar mediante el procesamiento de los datos numÚricos de la simulaciˇn, o a travÚs de las ecuaciones diferenciales que resultan de la aplicaciˇn de la segunda ley de Newton.
Mediante este trabajo se ha intentado explicar el gran aprovechamiento educativo que se puede hacer usando la Dinßmica de Sistemas para el anßlisis de los Movimientos Oscilatorios Forzado, Amortiguado y Armˇnico.
Empleando el mismo modelo, y modificando los valores de las variables seg˙n el caso a estudiar, se obtienen grßficas que facilitan enormemente el anßlisis, la comprensiˇn y la discusiˇn del sistema analizado.
|
 Informaciˇn
Informaciˇn